
Vamos a empezar un nuevo apartado del blog, que espero os sea de ayuda para muchos. Tutoriales de ajuste, ya que cuando se empieza en este mundo todo es nuevo y parece más complicado de lo que en realidad es.
En este primer tutorial nos vamos a centrar en el ajuste primero mecánico y luego por software de uno de los flybarless más asequibles del mercado, pero con unas prestaciones muy buenas sobre todo para helis de tamaño 450.
Para este tutorial vamos a utilizar un helicóptero de tamaño 450 de la marca tarot, ya que debido a su relación calidad y precio se ha hecho un hueco enorme en el mercado.
Bien, para este tutorial vamos a dar por supuesto que el helicóptero ya lo tenéis montado.
Para comenzar tenéis que conocer perfectamente vuestra emisora, ya que si no, no sabréis o podréis ajustar el helicóptero correctamente.
Para ajustar el rotor principal de cualquier helicóptero hay que empezar desde los brazos de los servos y paso a paso hay que ir subiendo hasta llegar a la parte más alta del rotor. Así que para empezar lo primero que vamos a hacer es centrar los brazos de los servos. Para ello tenemos varias opciones:
- Centrador de servos
- Tarjeta de programación del zyx
Para este tutorial vamos a usar la tarjeta programadora del zyx
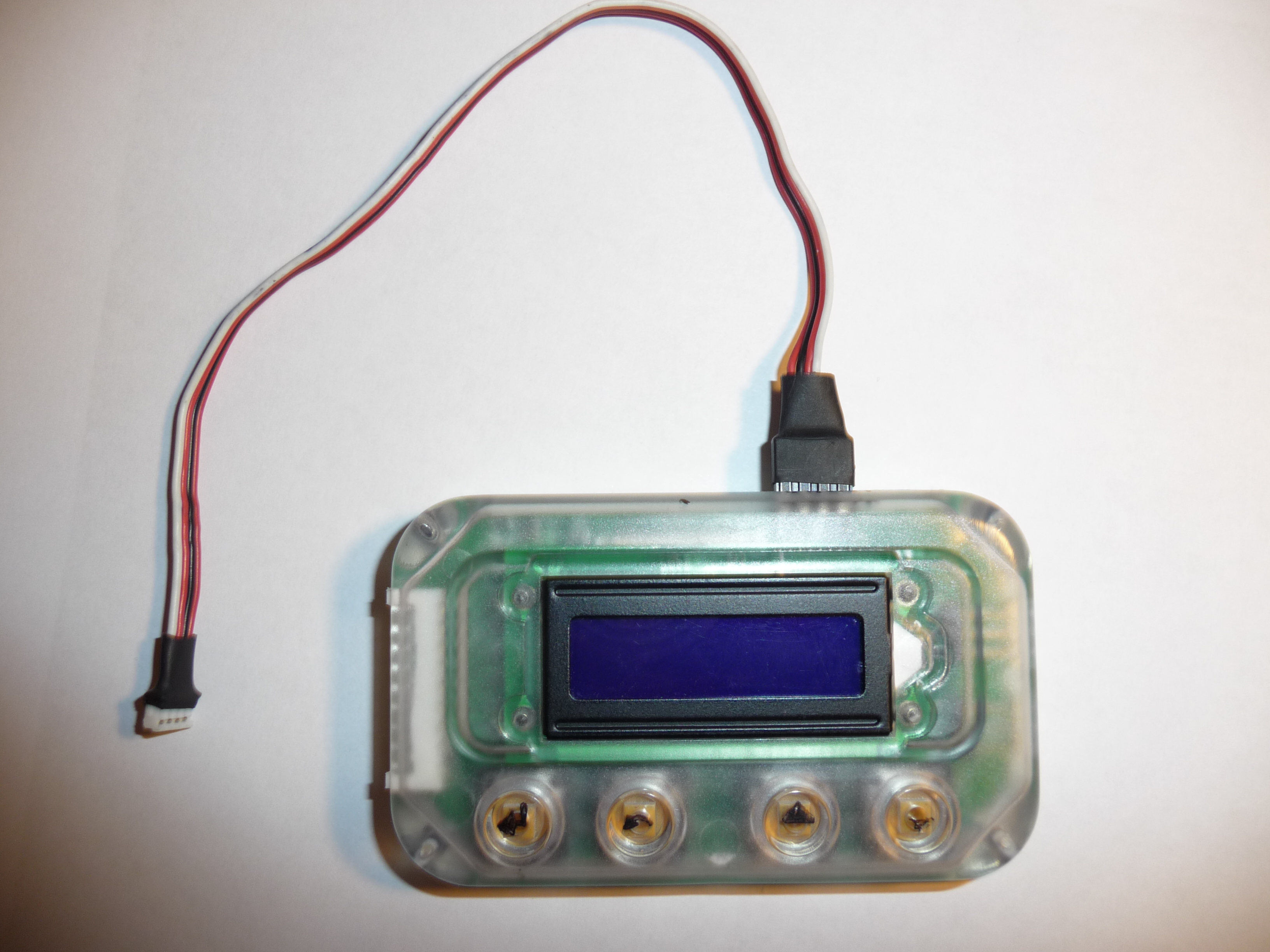
Para ello conectamos una lipo de 2 a 6S en el puerto balanceador de la tarjeta programadora y el servo el cual queremos centrar.
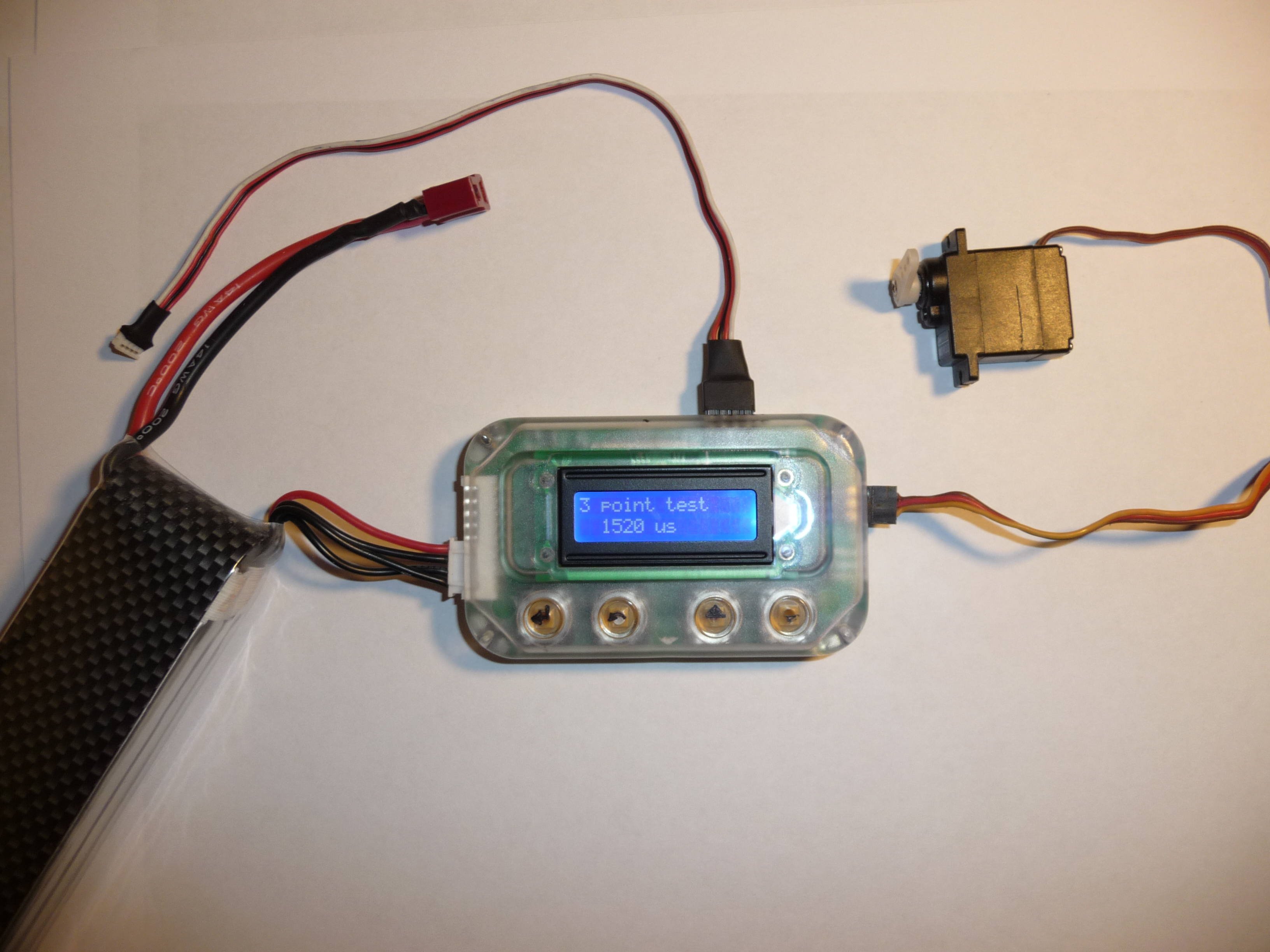
Primero conectamos la batería y una vez nos diga el voltaje de dicha batería, apretamos la tecla de la flecha hacia abajo y nos da la opción de «Servo type». En este apartado seleccionamos los µs a los que funciona nuestro servo. Si seleccionamos un tipo de servo incorrecto puede darse el caso de que quememos el servo que vamos a conectar, así que si no lo tienes claro revisa la documentación del servo o la página web del fabricante. Por regla general suelen funcionar a 1520µs. Una vez seleccionado el tipo de servo ya podemos conectarlo como aparece en la foto, es decir, con el cable de señal hacia el lado de los botones, y cambiamos de opciones en la tarjeta con las flechas hasta que encontremos la opción «3 point test», presionamos el primer botón para entrar en la opción y con las flechas podemos mover el servo desde su punto más bajo, 1100µs, punto medio 1520µs y punto más alto a 1940µs. Dejamos el servo en el punto medio y colocamos el brazo del servo.
Seguramente que el brazo no se quede completamente a 90º en relación al servo, pero hay que intentar que se quede lo más centrado posible, ya sea por arriba o por abajo. En un paso posterior ya lo centraremos perfectamente a 90º desde el programa de configuración del ZYX.
Si vuestro servo es metálico es muy recomendable poner fijatornillos al tornillo del brazo del servo ya que por posibles vibraciones se puede aflojar o incluso perder con la posible consecuencia de que se salga el brazo y estrellar el helicóptero.
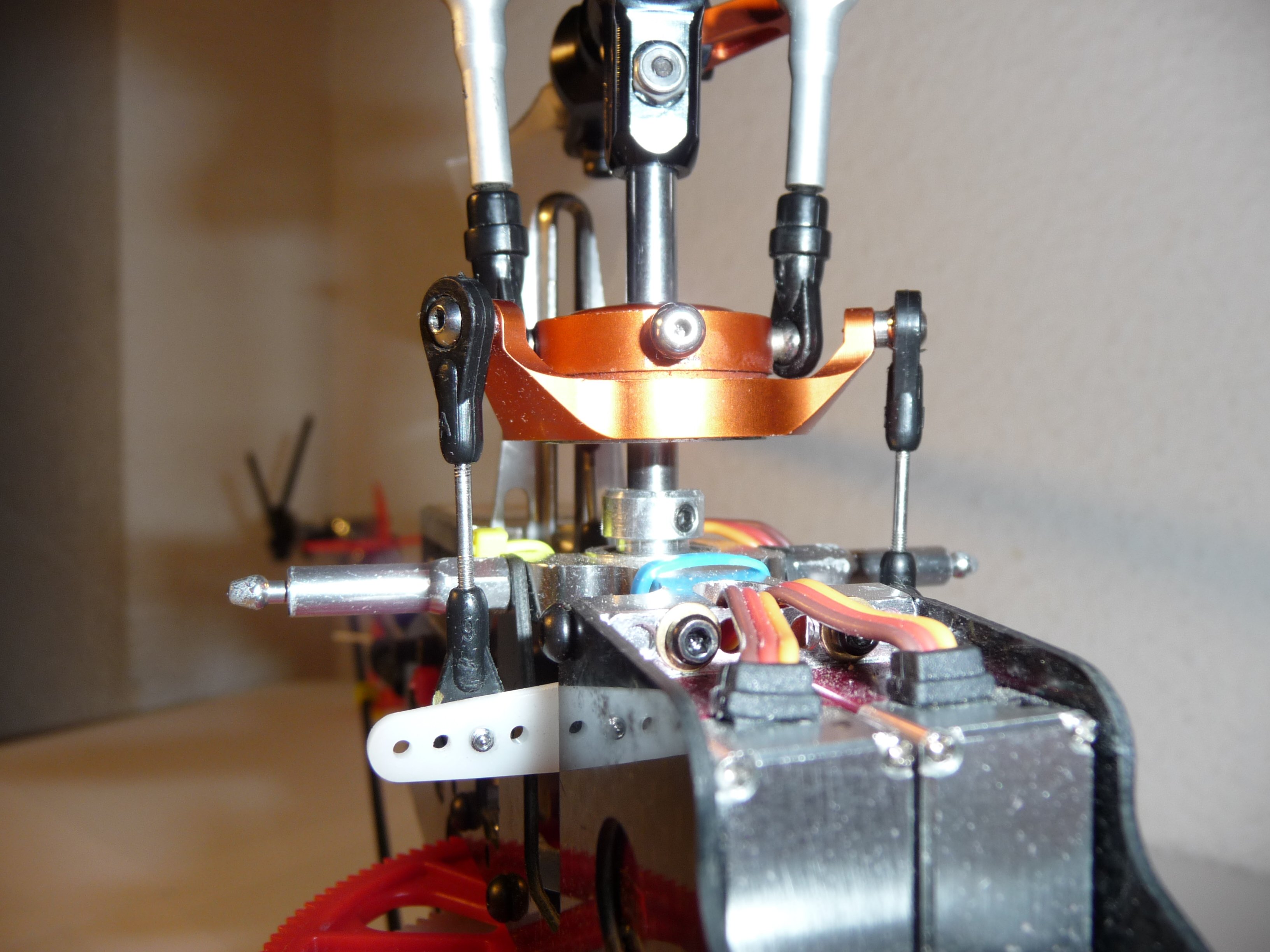
Una vez centrados los 3 servos y colocadas las bolas de enganche de los links en los brazos ya podemos montarlos en el chasis del helicóptero. Es muy recomendable que la bola la pongamos en el agujero del brazo que más nos convenga, es decir que el link que va a ir sujeto a esa bola y al plato cíclico quede lo más perpendicular posible al chasis, como se puede ver en la siguiente foto.
Bien una vez centrados los 4 servos con sus correspondientes brazos y ajustados los links al tamaño que indica el manual procedemos al montaje del eje principal con las coronas, el collar de sujeción y el plato cíclico, enganchando los links de los servos al plato cíclico.
Una vez realizado todo esto dejamos de lado el helicóptero y nos ponemos con el programa del ZYX.
Para este tutorial vamos a utilizar la versión 4 del programa, que a día de hoy es la última que ha sacado la gente de Tarot. Podéis descargarla desde el siguiente enlace: ZYX4.01EN . También dejo la versión anterior del programa por si tenéis problemas con esta: ZYX3.0EN
Una vez instalado el driver abrimos la aplicación. Hacemos clic en «setup» y vamos avanzando con el botón next hasta que nos encontramos con esta pantalla:
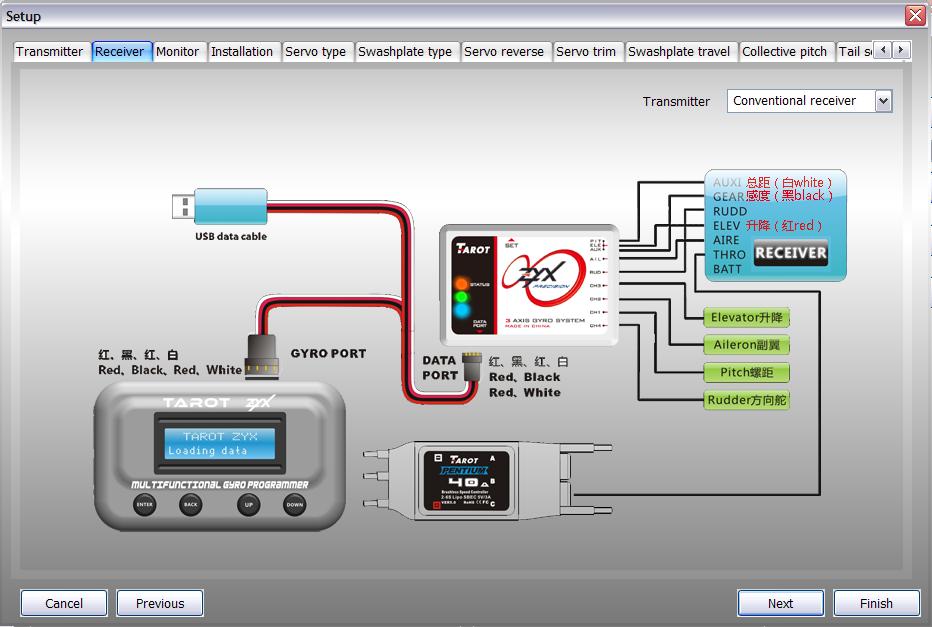 Conectamos todo según se indica en el diagrama excepto los servos y el motor al variador. Con esto conseguimos poder encender el heli y así poder proceder a la configuración del ZYX. Una vez conectado todo le damos al botón finish para cerrar el asistente.
Conectamos todo según se indica en el diagrama excepto los servos y el motor al variador. Con esto conseguimos poder encender el heli y así poder proceder a la configuración del ZYX. Una vez conectado todo le damos al botón finish para cerrar el asistente.
Y ahora ya si podemos encender la emisora en un modelo nuevo, y con el receptor sincronizado con nuestra emisora procedemos a conectar el ZYX al ordenador y una lipo al heli.
Con el programa del ZYX abierto, seleccionamos el puerto COM correspondiente en nuestro equipo y le daríamos al botón de conectar. Las 3 bolas rojas del programa cambiarán a verde si el ZYX se ha conectado correctamente.
Y ahora ya si podemos hacer clic en el botón de SETUP para comenzar a configurar el ZYX
Para empezar nos encontramos con esta pantalla:
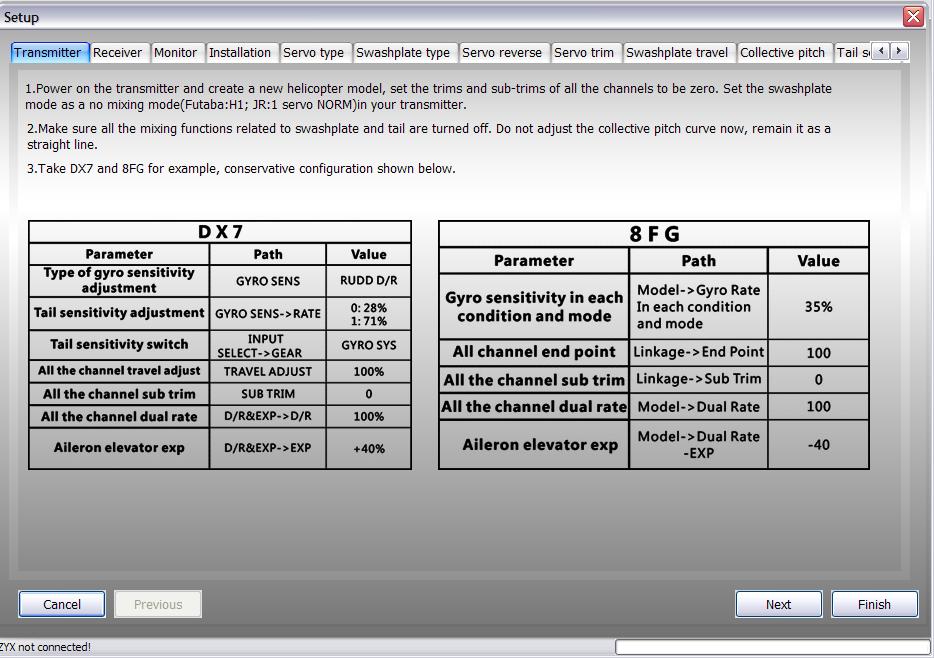
en la que nos explica cómo tenemos que configurar el modelo en nuestra emisora. Es decir plato cíclico H1 o 1 servo y las configuraciones básicas de sensibilidad del giro, end points, dual rates y exponenciales. Además de tener la curva de paso o pitch y la curva de motor o throttle lineales desde el 0 hasta el 100%.
Una vez configurado todo esto pasamos al siguiente paso que es el diagrama de conexión.
Hacemos clic en next y pasamos al siguiente paso, en el que enseñaremos al ZYX cuales son los punto máximos y minimos de nuestra emisora y configuramos los reverses de los canales que necesitemos
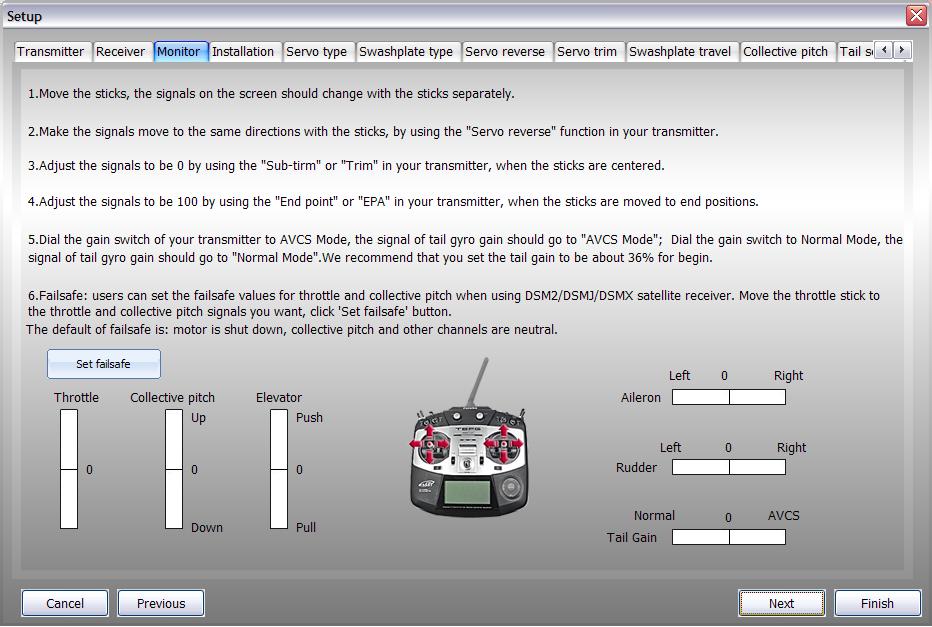
para ello movemos los sticks por separado y cada una de las barras de cada canal se tienen que mover hacia el mismo lado al cual movemos el stick. Si la barra se mueve en sentido contrario simplemente ponemos el canal correspondiente en reverse o en normal desde la emisora. La barra del throttle no se va a mover ni configurar a no ser que utilices un satélite de Spektrum en vez de un receptor tradicional.
Una vez configurados los reverses de los canales pasamos a los subtrims, es decir el punto central de cada uno de los canales, para ello centramos los sticks de la emisora y todos los valores de cada barra deben de quedarse a 0, si no es el caso, entramos en el los subtrims desde la emisora y subimos y bajamos los valores correspondientes a cada canal hasta que se queden todos a 0.
A continuación hacemos algo parecido al centrado de los canales pero en los puntos máximo y mínimo de cada canal. Para ello movemos los sticks de la emisora hasta el final de su recorrido y si el valor de la barra de cada canal no llega al 100% o se pasa del 100% necesitaremos subir o bajar los end points desde la emisora para cada canal hasta que los dejemos todos al 100%. Recuerda que tienes que hacerlo 2 veces por canal, uno en su valor máximo y otro en su valor mínimo.
Por último ajustamos la ganancia del giro desde la emisora hasta que en la barra del giro consigamos un valor del 36%.
Pasamos al siguiente paso, que le indicamos al ZYX en qué posición va a ir instalado
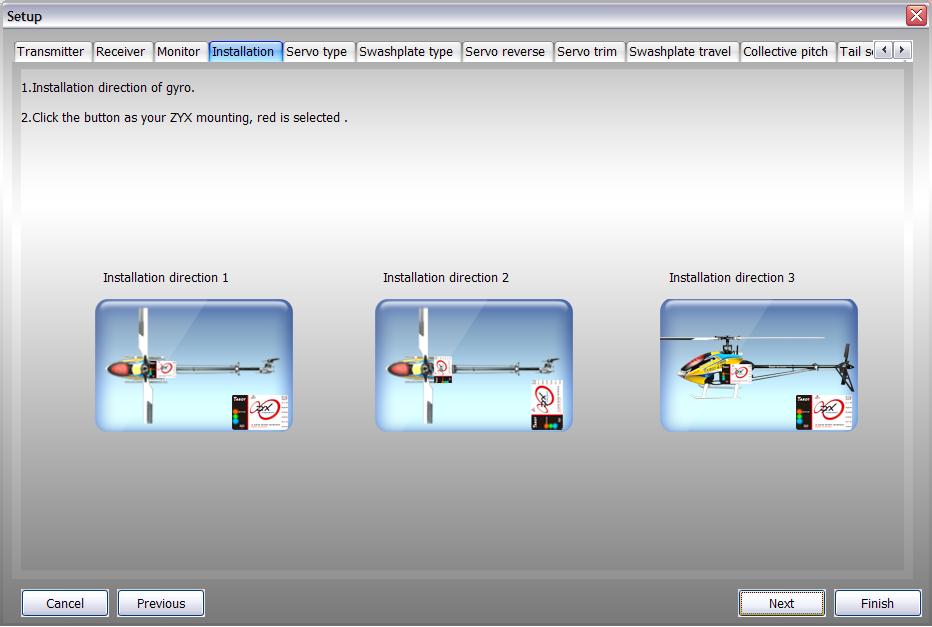
Así que pinchamos en la opción que corresponde con nuestra instalación. El ZYX SOLO se puede instalar en una de estas tres direcciones.
El siguiente paso seleccionamos el tipo de servos que llevamos instalados en nuestro heli. Si tenemos dudas lo mejor es consultar la web del fabricante de los servos
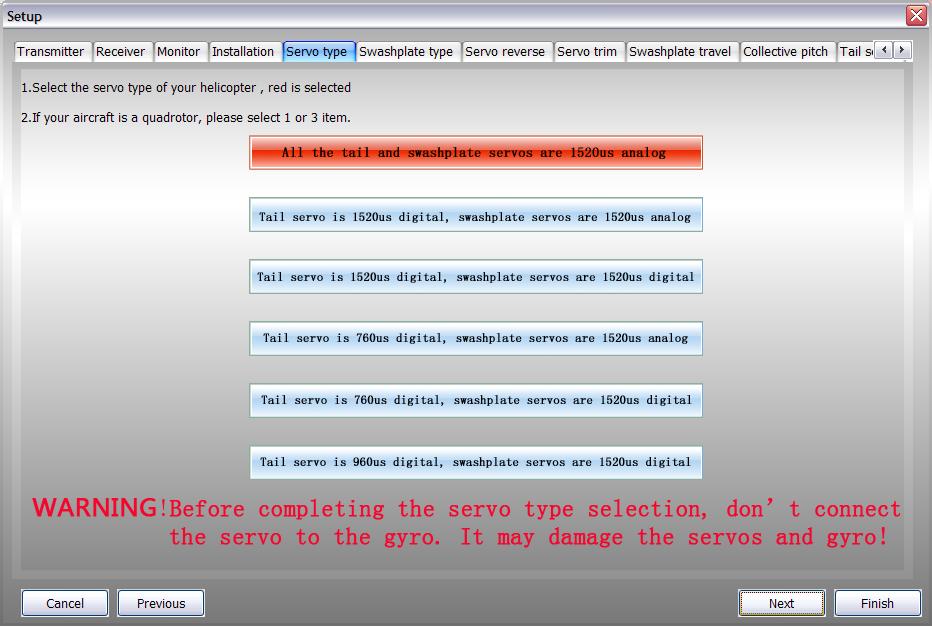
Una vez seleccionada la opción correcta podemos conectar nuestros servos al ZYX según el diagrama de la segunda pestaña.
Una vez conectados los servos pasamos al siguiente paso:
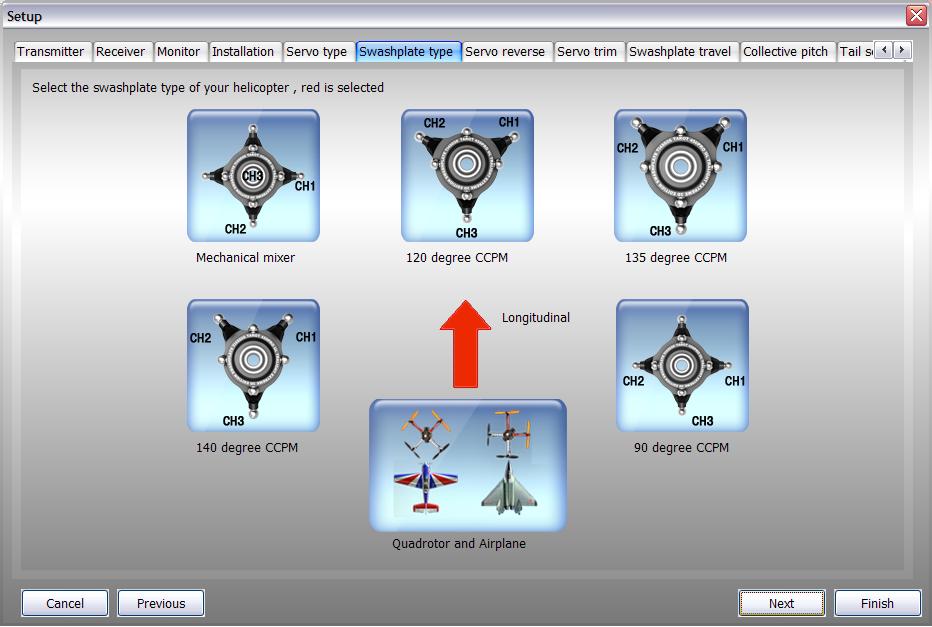
donde seleccionaremos el tipo de plato cíclico que monta nuestro helicóptero. En el caso de este ejemplo, el tarot 450 monta un plato de 135º. Una vez seleccionado pasamos al siguiente paso:
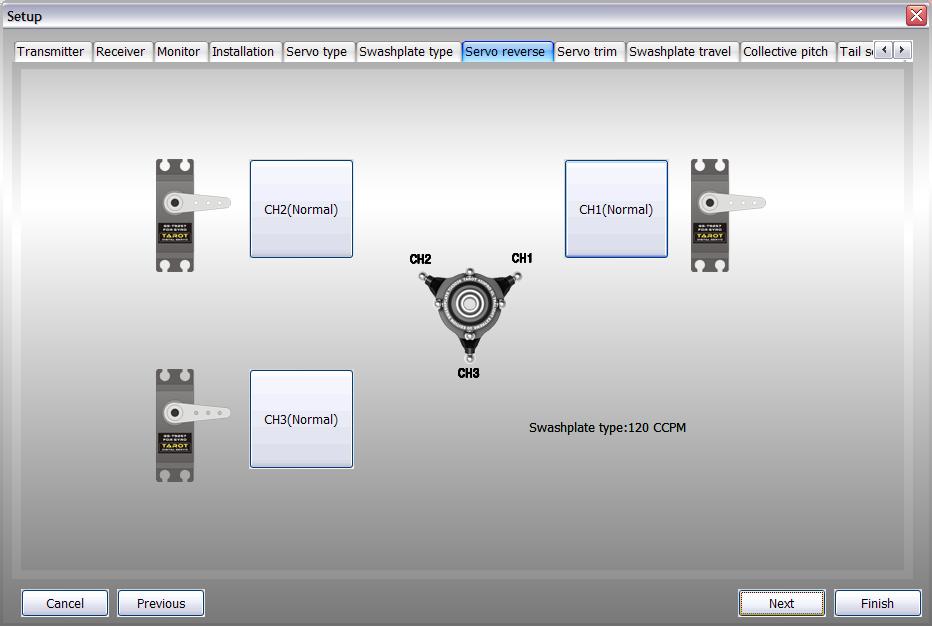
Donde le vamos a indicar al ZYX si nuestros servos se mueven correctamente o en sentido contrario. Para eso seguiremos los siguientes pasos con el stick del gas (izquierdo en modo2) en el centro para no forzar los servos si se da el caso:
- Elevador hacia arriba (stick derecho en modo2) el cíclico tiene que inclinarse hacia delante, es decir, el servo del ch3 tiene que subir y los servos ch1 y ch2 tienen de bajar.
- Elevador haca abajo (stick derecho en modo2) el cíclico tiene que inclinarse hacia atrás, es decir, el servo ch3 tiene que bajar y el ch1 y ch2 subir.
- Alerón hacia la izquierda (stick derecho en modo2) el cíclico tiene que inclinarse hacia el lado izquierdo, es decir el ch2 tiene que bajar y el ch1 subir. El ch3 no tiene que moverse.
- Alerón hacia la derecha (stick derecho en modo2) el cíclico tiene que inclinarse hacia la derecha, es decir, el ch2 tiene que subir y el ch1 bajar. El ch3 no tiene que moverse
Así que si nuestros servos no se mueven correctamente tendremos que seleccionar el servo correspondiente y darle al botón de reverse de cada uno de los servos hasta que consigamos que se muevan correctamente.
Una vez ajustados los movimientos de cada uno de los servos pasamos al siguiente paso donde nivelaremos el plato cíclico:
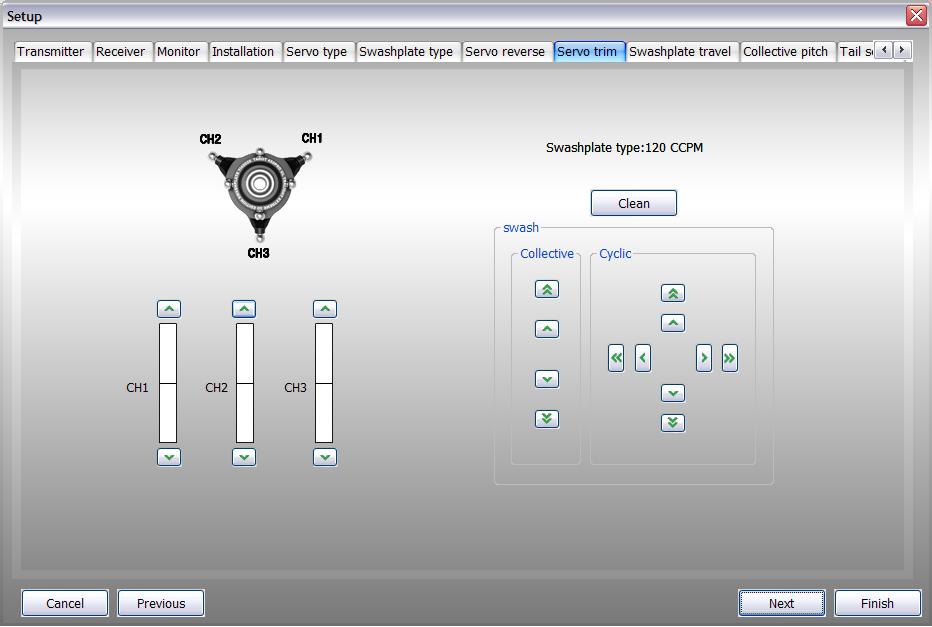
Este paso es muy importante para conseguir un vuelo estable en nuestro helicóptero. Para ello nos ayudaremos de un nivelador de plato como este:

simplemente metemos el nivelador por el eje hasta que apoyen las patas del nivelador con el plato cíclico donde tenemos enganchados los links de los servos. Recordad que todavía no hemos indicado que montemos la cabeza del heli, solo el eje, coronas, collar y plato. Bien, con el nivelador apoyado en el cíclico y con el stick del gas en el centro, las tres patas del nivelador deberían de estar en contacto con el cíclico, como no será el caso, ya que al centrar los brazos de los servos nunca se quedan perfectamente a 90º deberemos de subir o bajar las barras de cada uno de los servos desde el programa del ZYX hasta que las 3 patas del nivelador esté tocando el cíclico.
Aseguraros de que este paso queda perfectamente realizado antes de pasar al siguiente paso. En esta misma ventana tenemos a la derecha otros ajustes que utilizaríamos para ajustes más finos del cíclico pero que no vamos a comentar aquí.
Así que con el cíclico nivelado retiramos el nivelador del plato y procedemos a montar la cabeza del helicóptero.
Existen 2 tipos de cabeza para helicópteros flybarless de tarot, la normal, que es la que viene con washout para darle más rigidez a la cabeza y las DFC que al llevar el eje más corto no necesitan el wahsout.
Cabeza con washout:

Cabeza DFC:

Bien, si montáis la cabeza normal y el washout viene como una pieza independiente al hub, cuando atornilléis el washout al eje, los brazos horizontales tiene que quedar paralelos al plato cíclico. Y si el washout viene integrado en el hub para dejarlo paralelo al cíclico habrá que alargar o encoger los links de los servos al cíclico, por lo que cuando el washout quede paralelo deberías de volver a nivelar el plato, sólo con el nivelador sin el programa, por si no has encogido o alargado el mismo número de vueltas cada uno de los links.
En mi opinión yo prefiero la cabeza DFC ya que al tener el eje más corto el helicóptero es más estable.
Bien, una vez colocada la cabeza en el eje, con el stick del gas en el centro las palas tienen que quedar a 0º, si no quedan a 0º tendrás que alargar o acortar los links de los portapalas.
Para saber si tienes 0º en las palas necesitaréis un medidor de paso, ya sea digital o analógico. Si el que tenéis es el analógico necesitaréis una pieza que se coloca en el hub donde está el freno, como esta

y metiendo un flybar a través de esta pieza podemos utilizar nuestro medidor de paso analógico.
Una vez que hemos conseguido los 0º en las palas con el stick del gas en el centro podremos pasar al siguiente paso del programa, que es este:
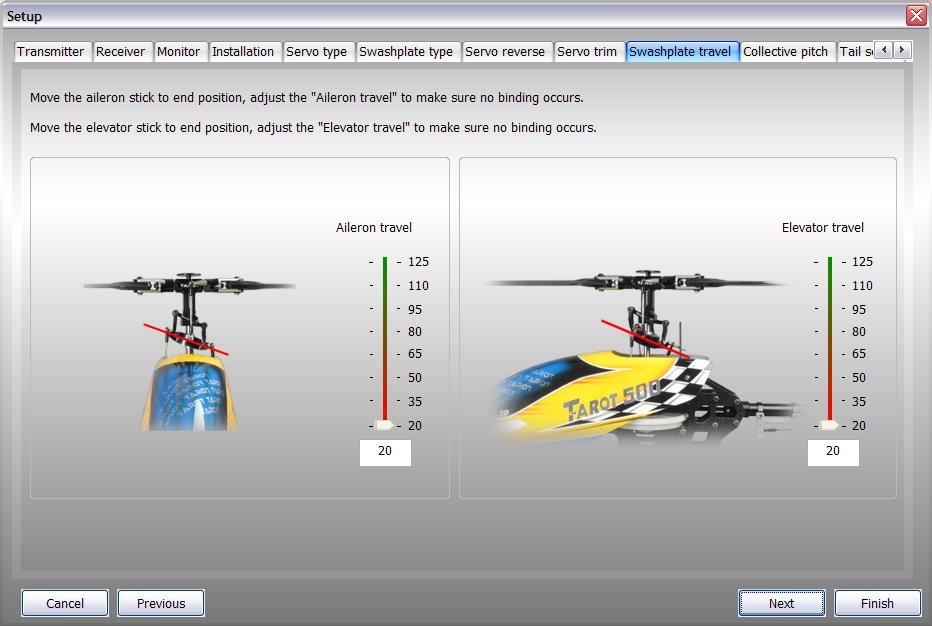
en el cual vamos a ajustar los grados de cíclico tanto para el alabeo como para el elevador.
Para ajustar el alabeo, con el stick del gas en el centro, colocamos el helicóptero como aparece en la imagen del programa (el helicóptero mirando de frente con las palas estarán totalmente extendidas y una de las puntas de las palas mirando hacia nosotros) movemos el stick del alabeo a izquierda o derecha hasta el final, y lo dejamos en esa posición mientras medimos los grados que dan las palas con el medidos de paso. Para pilotos principiantes recomiendo poner unos 5 o 6º ya que harán que el helicóptero sea más dócil. Aunque para un ajuste optimo debería de quedar a 9º.
Y para ajustar el elevador se procede de manera similar al alabeo. Con el stick del gas en el centro, colocamos el helicóptero como aparece en la imagen del programa (mirando el helicóptero de lado, las palas totalmente extendidas y la punta de la pala mirando hacia nosotros) y movemos el stick del elevador hacia arriba o abajo hasta el final y dejándolo en esa posición medimos los grados que da el medidor de paso en las palas. E igual que con el alabeo, para principiantes recomiendo 5 o 6º y para el ajuste optimo 9º.
Eso si, pongáis los grados que pongáis que sean los mismos tanto en el elevador como en el alabeo.
Una vez ajustados los grados de alabeo y elevador podemos pasar al siguiente paso en el cual ajustamos los grados de pitch.
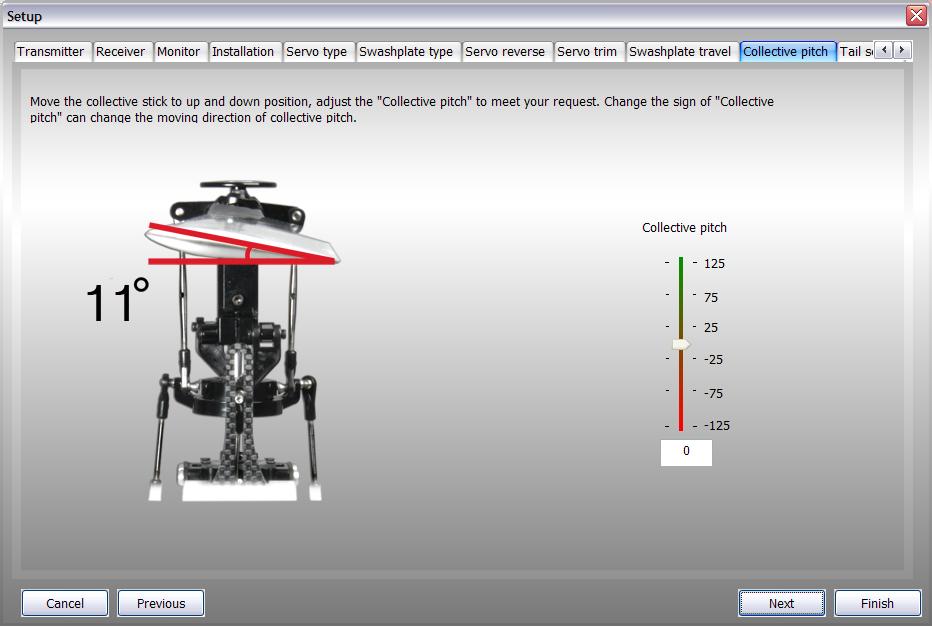
Así que con el stick del gas arriba del todo medimos los grados de las palas y tenemos que dejarlo a 11º, para conseguir estos grados, subimos o bajamos los valores de la barra. Si habéis realizado los pasos correctamente, con el stick del gas abajo del todo deberíais de tener -11º.
Una vez ajustado los grados de paso de las palas del rotor principal podemos pasar al siguiente punto donde vamos a ajustar el rotor de cola.
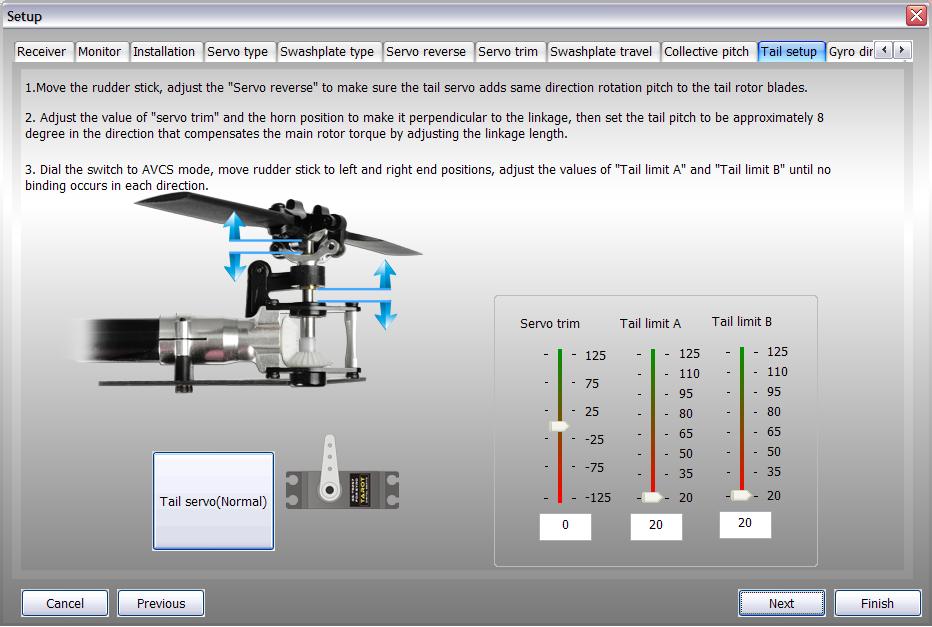
este paso consta de 2 apartados, el primero donde revisamos si el servo se mueve en la dirección correcta, y si no, mediante el botón de reverse cambiarlo y por otra parte donde ajustamos tanto el centrado de la cola como los límites a izquierda y derecha para no forzar el servo de cola.
Para revisar si el servo se mueve en la dirección correcta, si hemos montado correctamente la cola, si le damos al stick izquierdo hacia la izquierda, el deslizador que hay en el eje de cola debería de moverse hacia la izquierda, es decir, hacia la caja de cola, y viceversa. Si se mueve en dirección contraria lo podemos solucionar con el botón de reverse desde el programa.
Una vez solucionado el movimiento correcto del servo de cola pasamos a ajustar la cola. Para empezar ajustamos el link, es decir, el centrado del servo. Como el brazo del servo ya lo tenemos ajustado y centrado de cuando centramos los servos para el cíclico, procedemos a ajustar la longitud del link de la cola, para ello desactivamos desde la emisora el bloqueo de cola, el led del ZYX pasa de rojo a azul. Ahora doblamos las palas de cola hasta que las palas se queden paralelas y ajustamos la longitud del link para que se queden a 0º las palas. Para aclararlo fíjate en la foto siguiente:

Una vez ajustada la longitud del link de cola podemos ajustar los tres valores que nos indica la aplicación.
Empezamos por el trim. Para que el ZYX aguante bien la cola en las maniobras hay que poner unos 9º de paso negativo en el rotor trasero, sólo con la versión 3.5 y posteriores, para ello vamos ajustando el trim de la cola moviendo el deslizador hacia el lado de la caja de cola hasta conseguir esos 9º. Como medir los grados en las palas de cola en un 450 es complicado, lo que solemos hacer en el campo de vuelo es ajustar el trim hasta que nos entre justo el dedo índice entre las puntas de las palas (quien dice un indice, puede ser un meñique, dependiendo del tamaño de mano que tengáis), colocadas de igual manera que cuando las hemos ajustado para ajustar el link de cola.
Para ajustar los límites de la cola simplemente movemos el stick hasta el final a izquierda y derecha para ajustar cada uno de los límites. Simplemente tienes que ir subiendo o bajando el valor de cada límite hasta que veas que llegan hasta el final del recorrido sin forzar el servo.
Una vez ajustados los límites pasamos al siguiente paso, donde vamos a indicar al ZYX si compensa correctamente.
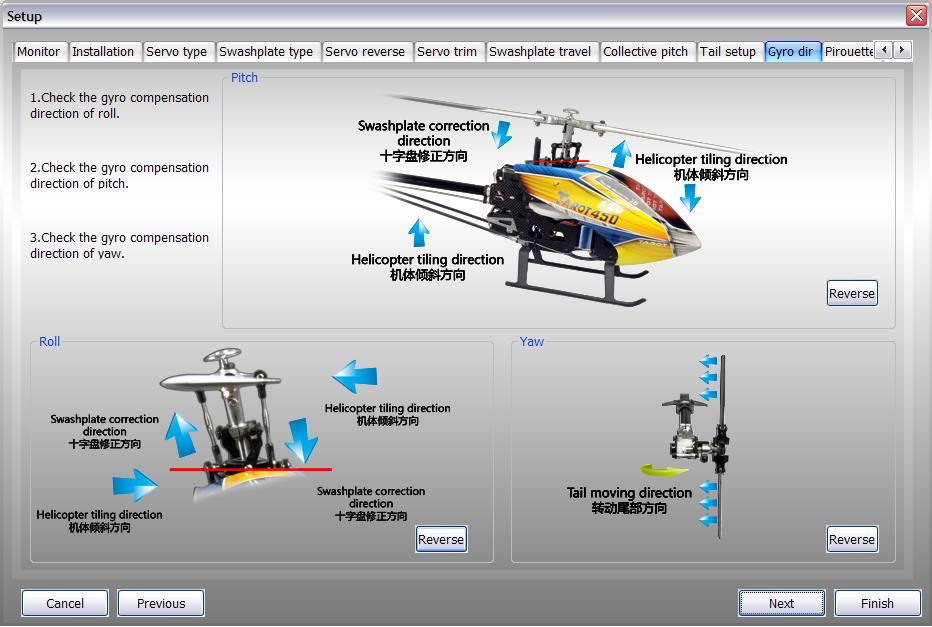
Empezamos con el elevador, cogemos el helicóptero como aparece en la imagen y lo movemos hacia delante y hacia atrás, si el cíclico se mueve en la dirección contraria y se nivela solo está bien configurado, si no está al revés y tendrás que cambiarlo con el botón de reverse.
Con el elevador igual, cogemos el helicóptero de frente y lo movemos de izquierda a derecha y si el cíclico que mueve solo hacia el lado contrario y se nivela solo está bien configurado, si no, botón de reverse para cambiarlo
Y para el rotor de cola igual. Una vez confirmado esto podemos pasar al último paso.
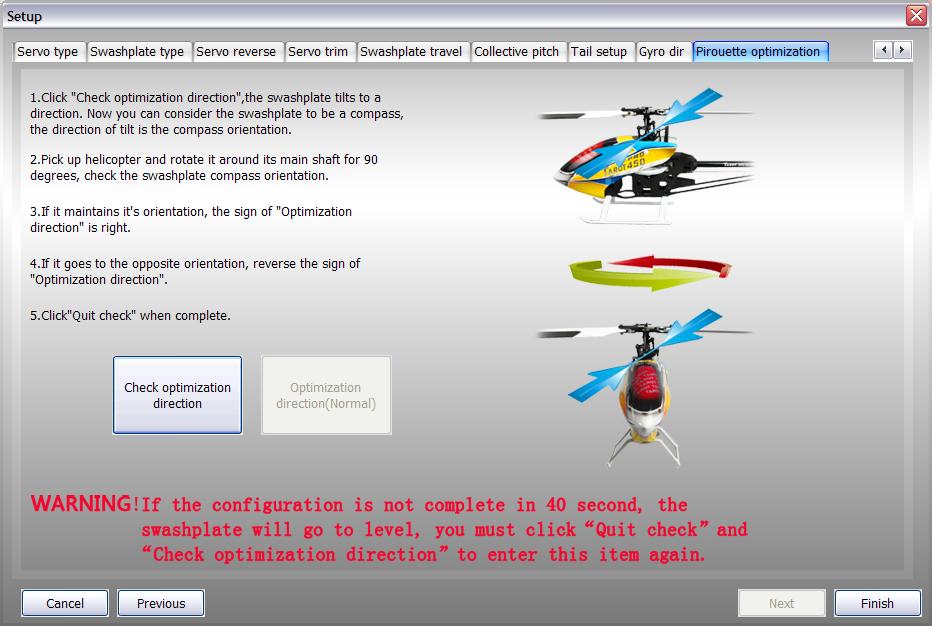
En este último paso vamos a realizar una última prueba de optimización de la dirección. Para ello dejamos el helicóptero en una superficie plana y le damos al botón «Check optimization direction». Una vez pulsado el botón el cíclico se inclinará hacia un lado y debemos de girar el helicóptero 90 grados, si el cíclico se comporta como si fuese una brújula, es decir que aunque hayamos movido el helicóptero 90º el cíclico sigue inclinado en la misma dirección (como si siguiese apuntando al norte) quiere decir que está bien configurado, si no, tan simple como ponerlo en reverse.
IMPORTANTE, para realizar este paso sólo tenéis 15 segundos. Si no os da tiempo, paráis y volvéis a empezar.
Una vez terminado este paso podemos darle al botón de «Finish» para terminar la configuración básica del ZYX y hemos vuelto a la pantalla principal, donde podemos indicarle al ZYX nuestro tipo de vuelo

o bien desde el botón «Advanced Menu» para configurarlo a tu gusto.
Nosotros volamos con los siguientes parámetros:
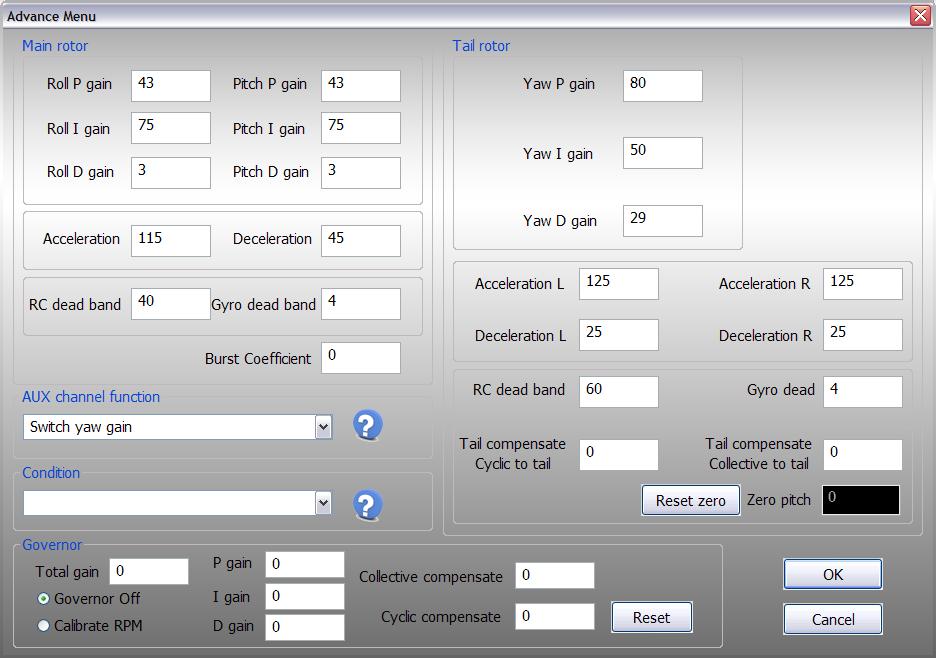
Aún así seguimos ajustando poco a poco. De todas formas se admiten sugerencias.
Un saludo y buenos vuelos.
Soy Javier del Club. Buen reportaje. No se sí lo a hecho Guillé, Alfonso o quien pero esta muy bien hecho. Saludos.
Muchas gracias Javi. Soy Alfonso y el artículo es mío. Si te animas a publicar algo avísame. Nos vemos en el campo de vuelo.
Hola a todos…
Bueno yo he conectado la tarjeta programadora como se ve en la 3ª foto y ahora
no me funciona el test de los servos.
He revisado el manual de la tarjeta y dice que hay peligro de dañarla si se conecta así.
Estoy hecho un lio…
Hola gonux, comprueba que has conectado el servo con el cable negativo (negro o marrón) en la posición correcta, como se muestra en la imagen.